Reliable and robust algorithms for pedestrian and road intersection detection
Grant Fondecyt 11060251.
Field Measurements
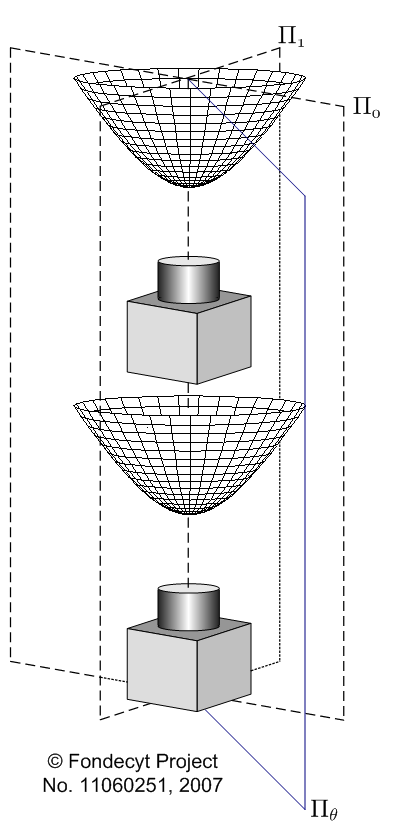
The following data sets were acquired from a vehicle equipped with an IMU, a differential GPS and a pair of omnidirectional hyperbolic cameras. The parameters of the omnidirectional cameras and their arrangement is shown below, together with the data format for the IMU messages.
Data Set 1
Lower Camera, Upper Camera, IMU, GPS (available soon)
Data Set 2
Lower Camera, Upper Camera, IMU, GPS (available soon)
Data Set 3
Lower Camera, Upper Camera, IMU, GPS (available soon)
Data Set 4
Lower Camera, Upper Camera, IMU, GPS (available soon)
Hyperbolic Mirror Dimensions
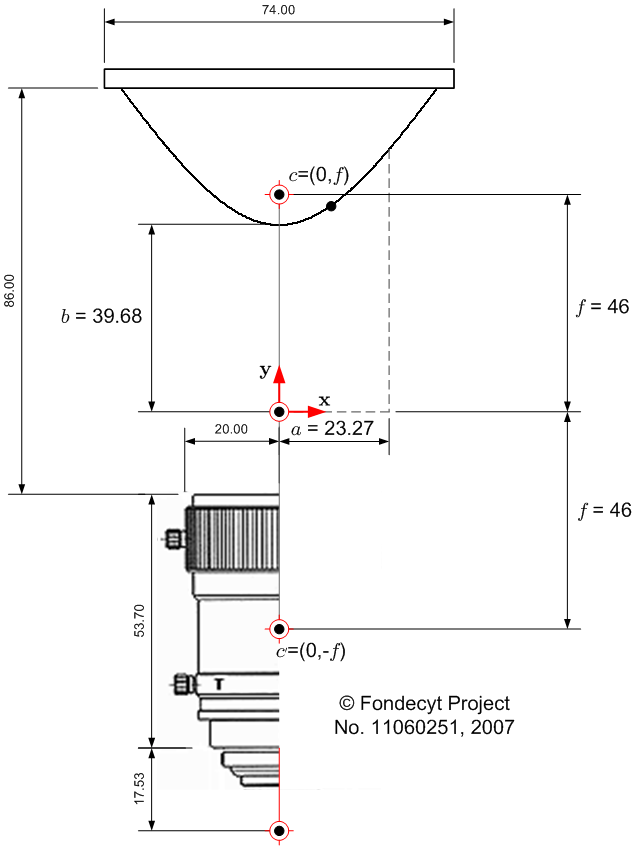
Camera Arrangement
IMU Data Format
The Inertial Measurement Unit (IMU) data is stored in ASCII format. Each field is separated by a semi-colon ";". Each new measurment is indicated with the string "START" at the beginning of a new line and ended with the string "END". The data fields withing the message and their units are:
START;<Acquisition Time>;<Roll: (Degrees)>;<Pitch (Degrees)>; <Yaw Rate (Degrees/sec)>;<X-axis Acceleration (G)>;<Y-axis Acceleration (G)>;<Z-axis Acceleration (G)>;END
Other Sites of Interest