Ubibot – Mini-robot de Telepresencia (Telepresence Mini-robot)
Grant Fondecyt 1110343 & CEDETI UC
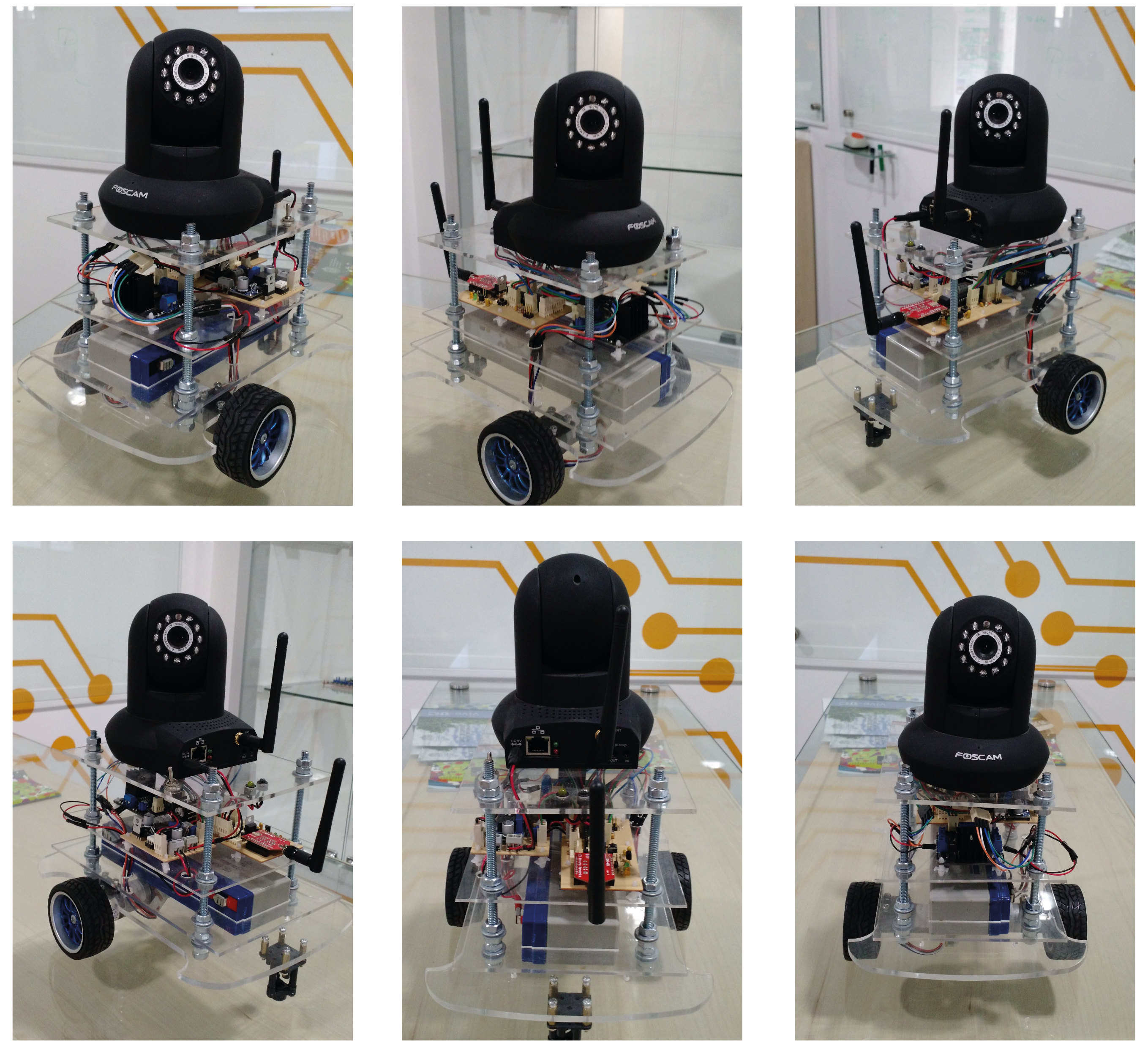
El Ubibot es un robot teleoperado de bajo costo y arquitectura abierta cuyo objetivo es permitir a personas con discapacidades motrices el poder observar las actividades en su hogar y comunicarse con otras personas que se encuentran en otras habitaciones o lugares del hogar.
En el diseño y desarrollo del Ubitbot han participado Francisco Retamales (autor principal), Bruno Wendt, el prof. Miguel Torres, del Laboratorio de Robótica y Automatización (RAL UC) y el prof. Ricardo Rosas del Centro de Tecnologías de Inclusión (CEDETI UC).Los autores agradecen el financiamiento para investigación y desarrollo otorgado por Conicyt, en el marco del proyecto Fondecyt 1110343.
Manuales
Manual de Ensamblaje de Ubibot
Manual de Configuración de Ubibot
Manual de Usuario de Ubibot
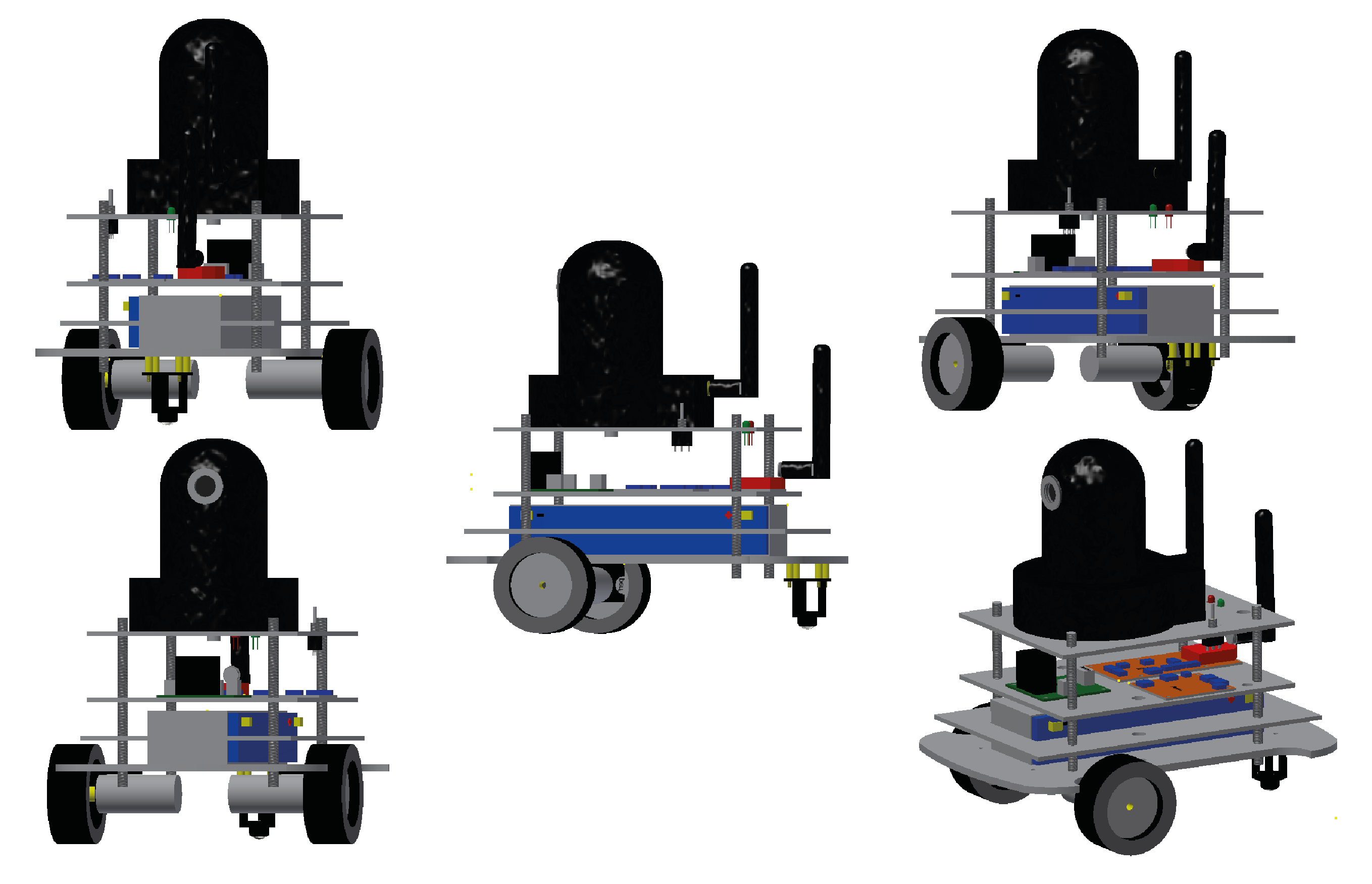
Planos Mecánicos y Eléctricos
Planos 2D del Chasis de Ubibot (formatos DWG y PDF)
Planos Placas Circuitales de Ubibot (formato Eagle 6.5)
Archivos Binarios Ejecutables (para Win7)
Software de interfaz gráfica de usuario (GUI) de Ubibot
Aplicación para la configuración de la cámara de Ubibot
Archivos Binario Firmware (para AVR8-ATMEGA328)
Firmware de Ubibot
Código Fuente
Código fuente del firmware, GUI y aplicación de configuración de la cámara de Ubibot
Otros
Pasos de configuración del módulo Wifly
Aplicación CoolTerm
Tobii EyeX SDK 2.0.4.250 disponible en el sitio de Tobii. Esto no requeiere una unidad Tobii EyeX para poder desarrollar aplicaciones, pero la unidad Tobii EyeX será necesaria para operar un Ubibot, a menos que se utilce un joystick, mouse o teclado como dispositivo de entrada alternativo.
Ubibot (c) - 2015.04.15
Ubibot (c) - 2015.04.15